空间复杂度
组成
- 指令空间:不同的编译器将产生不同的程序代码
- 数据空间:简单变量和常量、结构变量空间、数组空间、动态分配的空间。
- 环境栈空间:返回地址,形参,变量
度量
S(p)=c+Sp
固定部分(c)
包含指令空间(即代码空间)、简单变量及定长复合变量所占用空间、常量所占用空间等等。
实例特征(Sp)
分析程序的空间复杂性的步骤是:先找到实例的特征(m,n之类的),然后估算Sp.
注意事项
局部变量及形参的空间不难确定,递归的最大深度,循环的最多次数经常出错。
递归的时候往往多一次,因为最后一次递归是执行退出条件的。
循环有的时候会少一次,因为初值已经赋值一次了,只要进行n-1次就行了。
时间复杂度
组成
Tp=编译时间+运行时间
估算方法
操作计数(operation counts) :找出一个或多个关键操作,确定这些关键操作所需要的执行时间;
步数(step counts):确定程序总的步数。
其实不准,一个步骤执行n次的时间不一定等于该步骤执行时间的n倍。比如,计算机可以同时进行整数计算和浮点计算。
Horner法则多项式优化
P(x)=i=0∑ncixi
直接计算需要执行2n次乘法,n次加法;使用Horner法则进行优化
P(x)=(⋯(cnx+cn−1)x+cn−2)∗x+⋯)x+c0
只需要执行n次乘法,n次加法
1
2
3
4
5
6
7
8
| template <class T>
T horner(T coeff[], int n, const T& x)
{
T value=coeff[n] ;
for(int i=1; i<=n; i++)
value=value * x + coeff[n-i] ;
return value;
}
|
名次排序
先名次计算,再(原地)重排
名次计算
算法:循环进行$$C_n^2$$次两两比较,较大的名次加一
选择排序(及时终止)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| template<class T>
void selectionSort(T a[], int n){
bool sorted=false;
for (int size=n; !sorted && (size > 1); size--) {
int indexOfMax=0;
sorted=true;
for (int i=1; i < size; i++){
if (a[indexOfMax]<=a[i]) indexOfMax=i;
else sorted=false;
}
swap(a[indexOfMax], a[size - 1 ]);
}
}
|
冒泡排序(及时终止)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| template<class T>
bool bubble(T a[], int n)
{
bool swapped=false;
for (int i=0; i<n-1; i++){
if (a[i] > a[i+1]) {
swap(a[i], a[i+1]);
swapped=true;
}
}
return swapped;
}
template<class T>
void bubbleSort(T a[], int n)
{
for (int i=n; i>1 && bubble(a, i); i--) ;
}
|
还有一些步数什么的不想写了
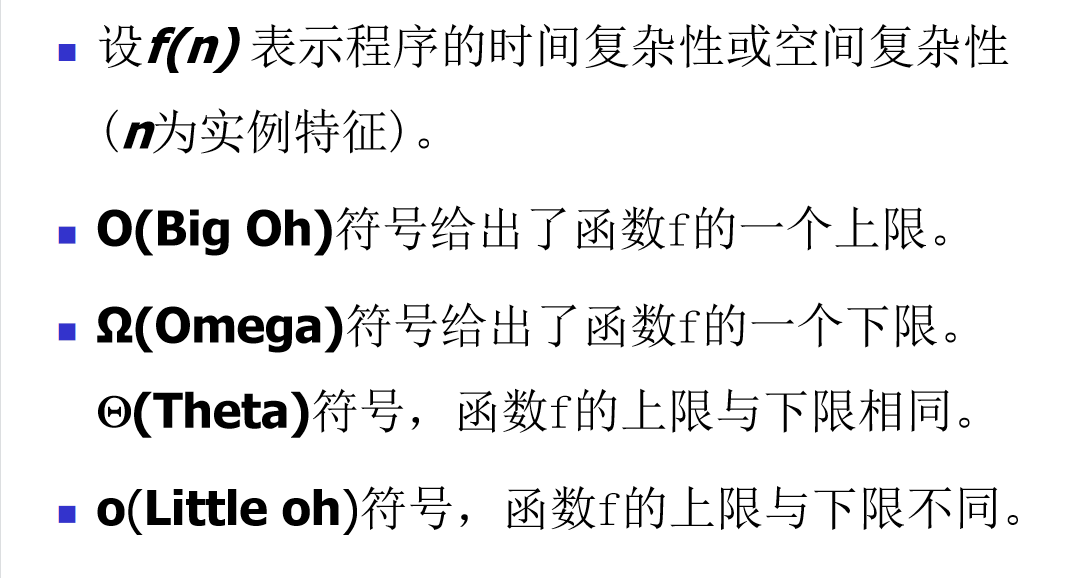
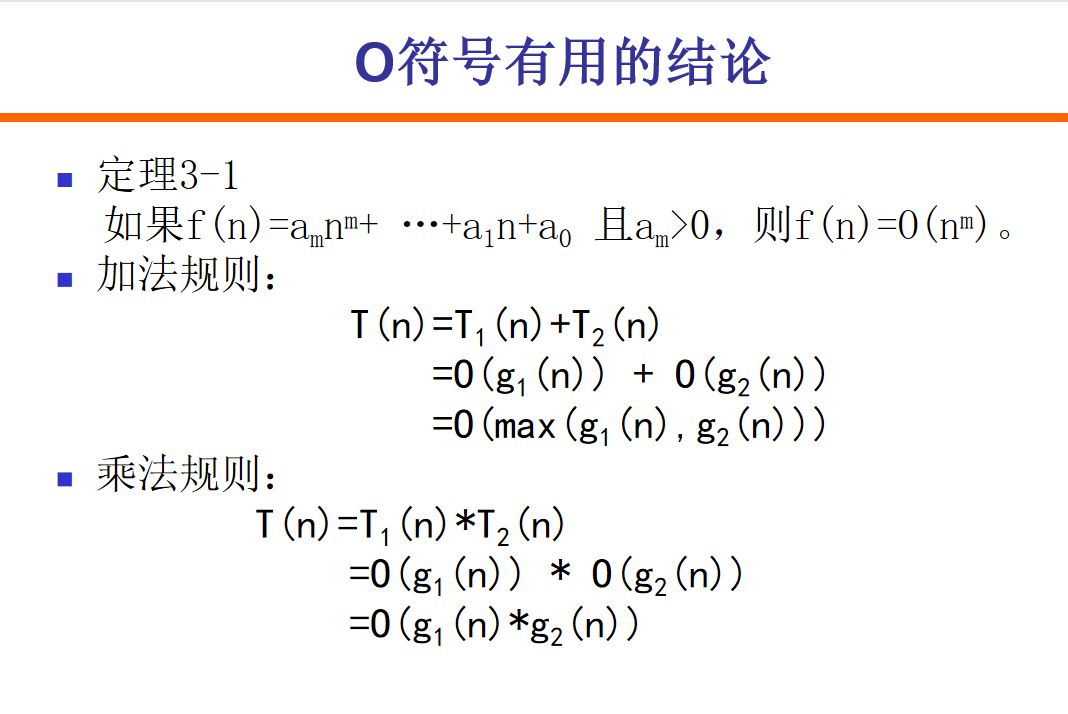
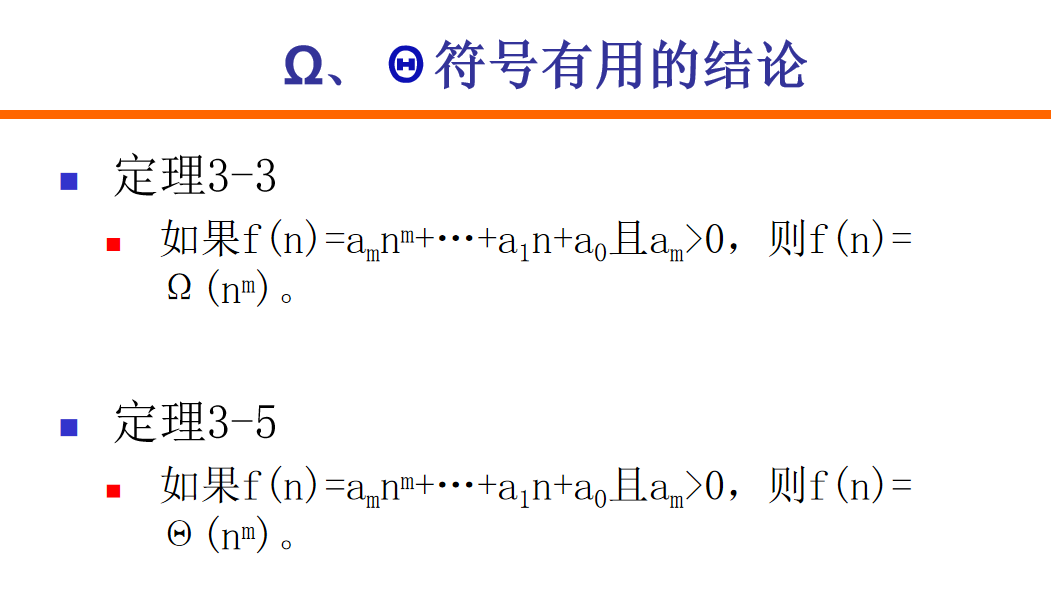
渐进记法
1 < logn < n < nlogn < n2 < n3 < 2n < n!
折半搜索是O(logn)